
一、 产品概述
RoomAPS(Room Absolute Positioning System),是一款基于光同步超声波技术的毫米级室内绝对定位系统。它通过部署于天花板的基站网络,为机器人、AGV等移动设备提供全局、无累积误差的毫米级精确三维坐标,从根本上解决了相对定位技术的漂移问题。 打造成一套机器人通用的“室内GPS”终极解决方案,是我们孜孜以求的目标。
二、 产品特性
定位精度高:定位误差稳定控制在±4mm以内(在科学严谨的测量安装和理想使用环境下,可以达到±1mm以内的定位精度)。
绝对坐标定位:每次定位都是通过全局坐标运算获得,没有累积误差,没有数据漂移。
三维坐标输出:在输出XY坐标的同时还可以输出高度Z坐标。可用于大型吊装、AGV、室内无人机、电子宠物等的定位。
方位角度测定:可用于复杂电磁环境下的方位角度测定。通过在车头和车尾各装一个定位终端,计算两坐标点连线可获得方位角度。
数据频率高:定位数据刷新为10Hz,满足机器人、AGV等高速移动的需求。
抗干扰能力强:环境光、电磁环境、运动物体等对系统工作影响较小,稳定可靠。
无运动部件:没有运动噪音,维护工作量少。
基站坐标自动标注:安装完定位基站后,只需带着定位终端在定位场所中走几圈,系统就自动完成基站坐标的采集和标注,免去人工测量和配置的操作,省时省力还不会出错。
结构小巧美观:易安装,适用范围广。
与IP网络无缝衔接:边缘网关可自动将场内定位数据提交到指定服务器中。
接口简洁易集成:完善的配套支持软件,简洁的数据输出,让软硬件工程师都能快速上手。
三、 系统组成
RoomAPS系统由四部分组成:定位基站网络、定位终端、边缘网关、以及配套支持软件。
RoomAPS定位基站网,由在定位区域天花板均匀分布的若干定位基站组成。天花板层高2m~20m范围。
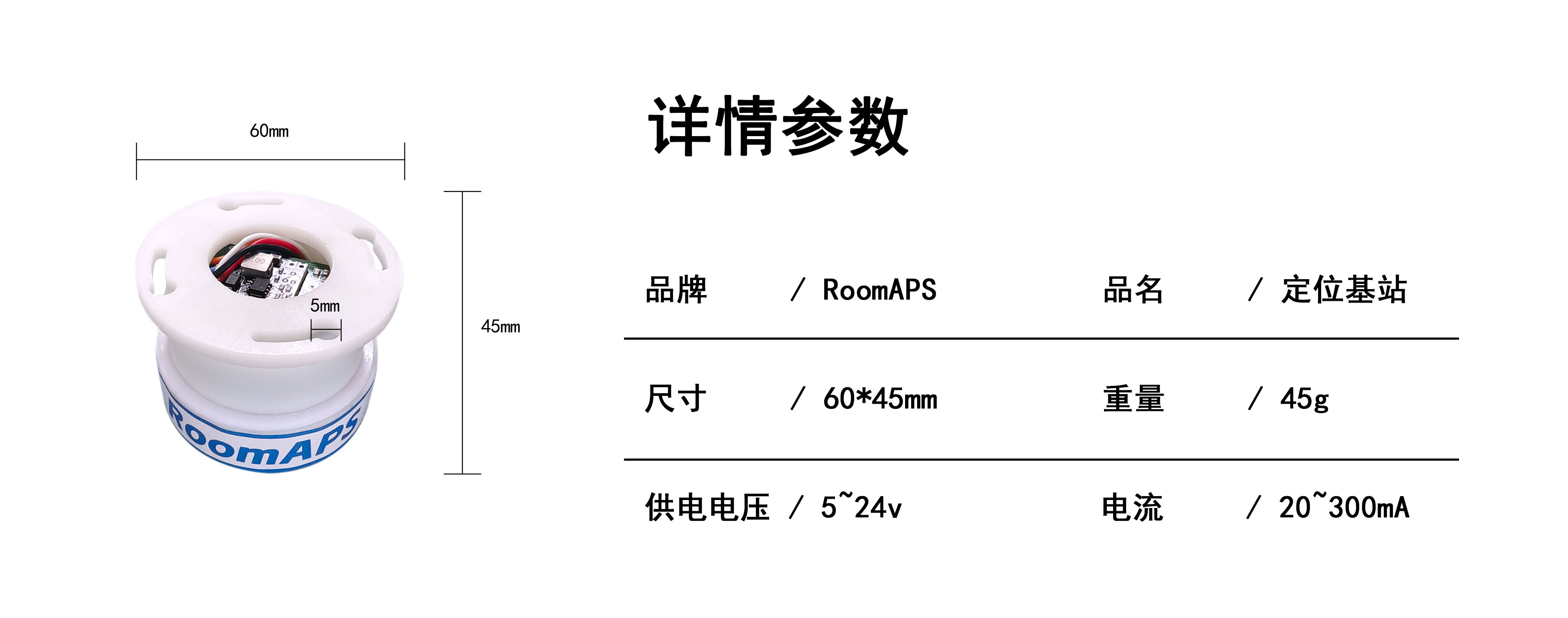
3.1 RoomAPS定位基站:
高60mm,直径115mm,安装开孔80mm。供电电压24v,电流20~300mA。

RoomAPS定位基站的安装密度,和层高有较大关系。因为定位终端是以90~120度束射角往天花板发射信号,要完成三点定位,信号照射范围内就必须包括3个及以上的定位基站,所以从几何分析上可知层高越高,定位基站可以安装得越稀疏。从实践经验上讲,定位基站的纵横密度值和层高值接近为最佳,在这种情况下,定位设备通常可以覆盖到5到7个定位基站,从而获得比较高的定位精度。
通常来说覆盖基站越多,精准度越高,在成本不敏感的情况下,可适当增加基站密度。
RoomAPS定位基站除了安装在天花板上,也可以安装在能够被信号照射到的墙壁上。在不同高度位置安装定位基站,对提高定位精度更加有益。
RoomAPS定位基站在安装方式上,有筒灯式安装、抱箍式安装、卡座式安装,以适应不同的安装环境。
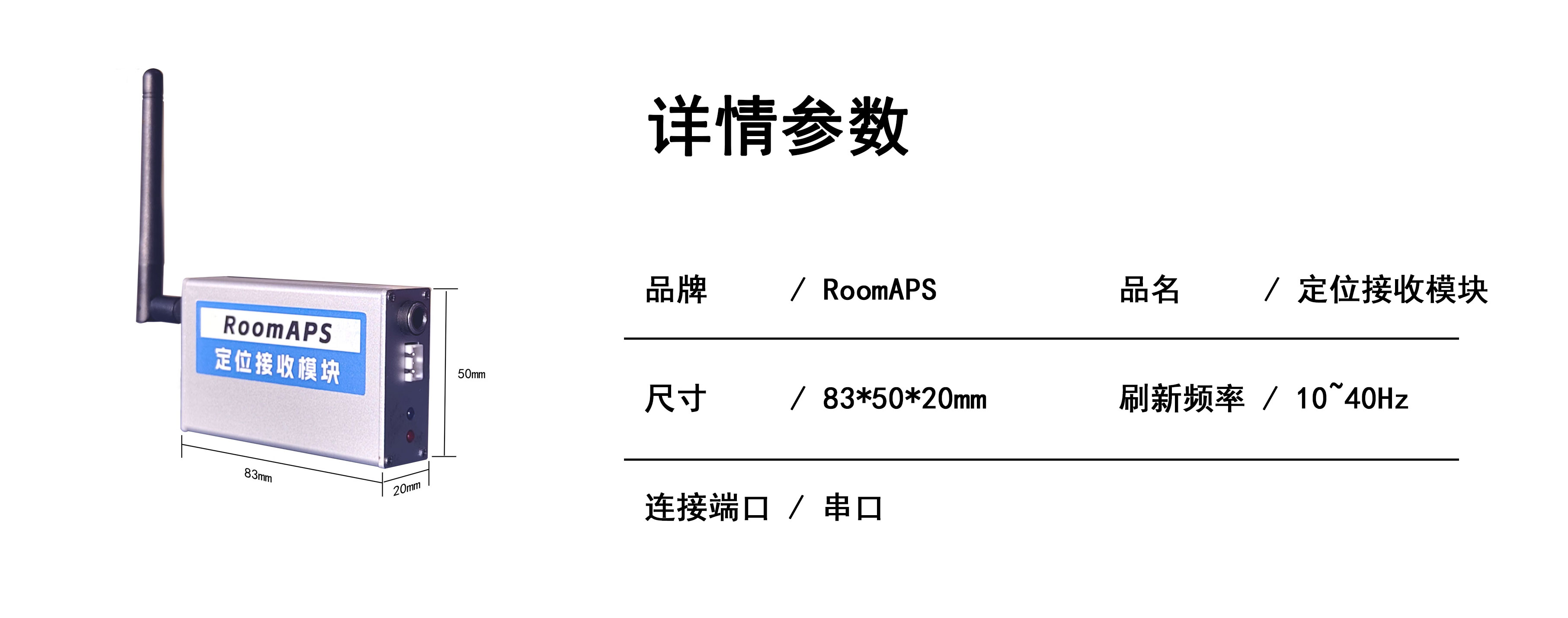
3.2 RoomAPS定位终端:
定位终端安装在机器人上面,计算机器人的位置信息,并将定位结果数据以串口输出给机器人。RoomAPS定位终端由定位模块、定位探头两部分组成。
定位模块:由24v供电,工作期间,定位模块持续不断地通过串口连接线向上位机输出定位数据,并通过无线射频信号向边缘网关发送定位数据。定位模块可以安装在箱体内部,只需要天线有信号即可(也可选用外接塔式天线)。
定位探头:定位值锚定的坐标点,是定位探头的大圆孔平面中心。定位探头,应垂直向上安装且不能有遮挡物,尺寸大小为24mm*32mm。数据同步光为940nm的不可见红外线光,无运动部件。

3.3 边缘网关
边缘网关由24v供电,每个边缘网关的管理范围为半径150米左右。面积较大的场所可装多个边缘网关。
边缘网关功能是:
1、 为场所内的各定位终端分配信道资源(即定位时间片段),避免多个定位终端同时向定位基站发射定位请求而造成信号冲突。它能够根据定位终端分布位置,为各个定位终端提供尽可能多的定位信道,以保障各定位终端都有较优的定位刷新频率。
2、 为定位终端传递环境信息。如通过自带的温湿度探头,将采集到的温湿度传递给定位终端,使其能对超声波传播速度进行精确修正。
3、 收集场内各定位终端的位置数据,并将其提交到TCP/IP网络中的数据服务器,供应用系统调用。


3.4 配套支持软件
RoomAPS自动测量与标注软件(必备):在安装好定位基站时,需要用这个软件对安装的基站进行坐标测量和标注,以建立起RoomAPS的工作环境。
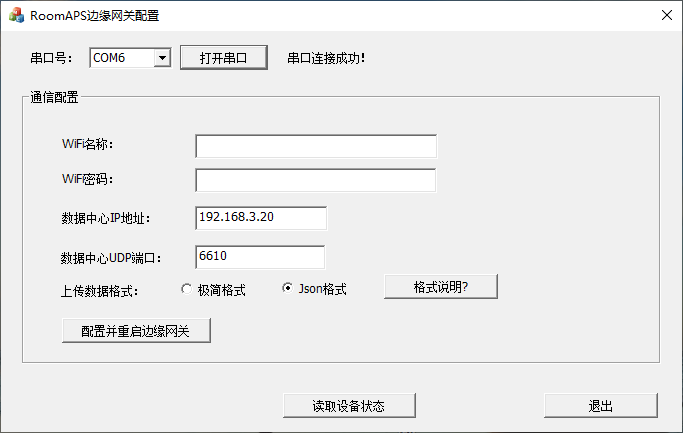
RoomAPS 边缘网关配置软件(必备):主要是配置接收数据的服务器地址和端口号,以及提交的数据格式。
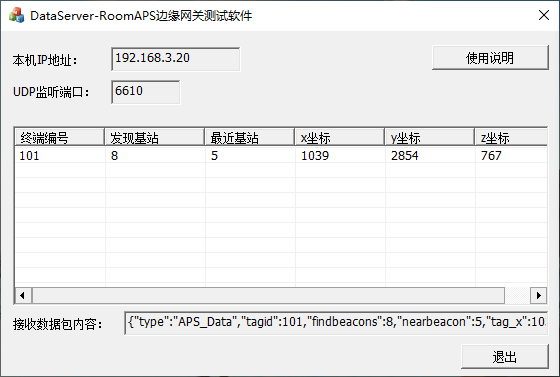
RoomAPS数据测试软件(选用):用我们提供的测试软件对各设备工作情况进行数据接收测试。现在提供了两个,一个是和定位终端串口连接的测试软件,另一个是用于接收边缘网关数据的测试软件。
四、 系统部署
4.1 RoomAPS定位基站网部署
1、规划定位区域范围,规划安装定位基站数量,规划定位基站安装点,规划自己中意的全局坐标原点和x轴y轴朝向,不讲风水,符合自己习惯、方便自己的程序处理就行。实践经验得出,定位基站的间距值建议略小于等于层高值。
2、将各定位基站分别安装到规划的基站安装点,并连接好电源线、接通电源。
3、打开基站配置工具软件,在软件上搜索到安装的各个定位基站,对基站从1开始进行逐一编号。需要注意有特殊用途的3个基站:1号基站放坐标原点(0,0)位置, 2号基站在x坐标轴的正值轴线上,3号基站位于y坐标正值侧(不一定在y轴上,因为要求在y轴上的话操作上是很难办到)。1、2、3号基站不能在一条直线上(即:不能3点共线)。系统输出的绝对坐标值,即以1~3号基站所确定的坐标原点和坐标轴方向为基准。
4、 打开基站配置工具软件,在软件上点击“基站坐标自动标注”功能,然后按照提示操作,带着一个定位终端在定位场所里平稳走两圈,等到软件上提示基站坐标解算完毕时,你就可以点击“同步基站坐标数据”,就完成整个基站坐标的配置工作了。
5、基站参数配置完成后,即可通过定位终端开始您的定位工作。
6、定位基站的状态灯提示:RoomAPS定位基站设备在启动时,蓝色指示灯会长亮,直到启动完成后熄灭;正常工作状态下,蓝色指示灯每5秒闪烁一次;收到定位信号请求时,蓝色指示灯会闪烁一次。通过指示灯状态,可以判断出基站的电源及工作状态。
4.2 RoomAPS定位终端部署
定位探头:需垂直向上安装,且无遮挡物。建议安装在机器人的顶部位置。为了数据直观和减少上位机运算量,在安装水平面上,最优选是安装在机器人的平面运动中心,次优选安装在机器人正前方或正后方,但是,即便安装在其他位置也不会对精度有影响。
定位模块:可以安装在机器人上任意位置。定位模块串口连接机器人控制主机,在接通24v电源后,以定位发射头为锚点的定位数据就会源源不断地发送给机器人控制主机。
如果你在机器人上装两套定位终端,那么上位机就收到机器人上面的两个定位点坐标,你再做两点连线运算,你就可以获得机器人的角度信息。在地磁角传感器受影响的情况下,这个角度信息比较有用。
4.3 RoomAPS边缘网关部署
可安装在室内任意位置,如墙壁上、桌上等,但要暴露于空气中并远离热源的位置,以便它能正确测量室内环境温度和干湿度。
接通24v电源后,需使用边缘网关配置软件,设置WiFi联网信息和数据服务器地址,以及提交数据的格式。
每个边缘网关的管理范围为半径150米左右,超过时需增加边缘网关的安装。
五、 定位终端数据接口
串口波特率:115200bps。
定位数据输出方式:自动。
定位数据格式:[APSp1@p2Dp3#p4Xp5Yp6Z]。其中p1为定位终端编号,p2为接收到信号的定位基站数量,p3为最近基站编号(还可用于楼层识别),p4为定位坐标x值,p5为定位坐标y值,p6为定位坐标z值。
六、 边缘网关数据接口
设置工作:设置WiFi名称和密码,设置服务器IP地址和UDP端口。
数据类型:TCP/IP网络的UDP数据包
定位数据输出方式:自动
数据包格式:分别有两种提交格式供用户自行选择。Json格式,{"type":"APS-Data","tagid":xxx,"findbeacons":xxx,"nearbeacon":xxx,"tag_x":xxx,"tag_y":xxx,"Tag_z":xxx};极简格式,[MPS$$@$$D$$#$$X$$Y$$Z],对应参数顺序和Json数据格式的一样。
七、 应用场景
工业物流: AGV、自主装卸机器人、大型吊装,人员定位。
商业服务: 服务接待机器人、导览导购机器人,营销互动机器人,杂物清理机器人,室内无人机。
公共安全与医疗: 安防巡逻机器人,医疗辅助机器人。
家庭生活: 家庭管家机器人(杂物清理、清扫、物品递送),陪伴交互机器人。
八、选择RoomAPS的理由
1、 RoomAPS的定位精度±4毫米、定位频率10Hz,为行业顶尖水准。而现在3D激光扫描雷达和深度相机的SLAM算法定位精度在10厘米~30厘米之间,定位频率在2~10Hz之间。
2、 RoomAPS的定位终端价格极具颠覆性(几百元)。与现在机器人定位用的3D激光扫描雷达动辄上万的价格相比,九牛一毛。
3、 RoomAPS的定位终端直接输出三维定位坐标,应用开发极为简便。而3D激光扫描雷达需要SLAM算法做点云分析,有开发难度,且需要庞大的算力支持。
4、 RoomAPS和卫星定位原理相似,相当于建立一套私有的室内GPS系统。采用三点定位方式,而非SLAM的相对定位,绝对位置定位,没有运算漂移。
5、 RoomAPS还可输出当前定位基站编号,在多层空间时,上位机可据此获得机器人的当前楼层等信息。
6、 RoomAPS的整个系统无运动部件、无声光污染,简单耐用。
7、 RoomAPS的定位基站,能够给所有安装了定位终端的各类机器人提供定位服务。就如:安装一盏公用电灯,就能让所有机器人都丢掉手里那枝昂贵的手电筒。
8、 RoomAPS定位基站的安装,如同安装灯泡一样,简单方便。安装方式上,有筒灯式安装、抱箍式安装、卡座式安装,以适应不同的安装环境。